Filtros Cic (cascaded Integrator-comb) 2l3x6e
This document was ed by and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this report form. Report r6l17
Overview 4q3b3c
& View Filtros Cic (cascaded Integrator-comb) as PDF for free.
More details 26j3b
- Words: 2,093
- Pages: 10
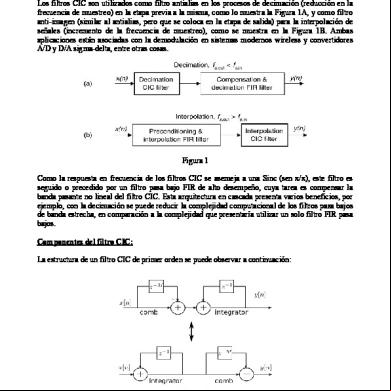
Filtros CIC (Cascaded Integrator-Comb) Aplicaciones: Los filtros CIC son utilizados como filtro antialias en los procesos de decimación (reducción en la frecuencia de muestreo) en la etapa previa a la misma, como lo muestra la Figura 1A, y como filtro anti-imagen (similar al antialias, pero que se coloca en la etapa de salida) para la interpolación de señales (incremento de la frecuencia de muestreo), como se muestra en la Figura 1B. Ambas aplicaciones están asociadas con la demodulación en sistemas modernos wireless y convertidores A/D y D/A sigma-delta, entre otras cosas.
Figura 1 Como la respuesta en frecuencia de los filtros CIC se asemeja a una Sinc (sen x/x), este filtro es seguido o precedido por un filtro pasa bajo FIR de alto desempeño, cuya tarea es compensar la banda pasante no lineal del filtro CIC. Esta arquitectura en cascada presenta varios beneficios, por ejemplo, con la decimación se puede reducir la complejidad computacional de los filtros pasa bajos de banda estrecha, en comparación a la complejidad que presentaría utilizar un solo filtro FIR pasa bajos. Componentes del filtro CIC: La estructura de un filtro CIC de primer orden se puede observar a continuación:
Figura 2 Como se puede ver, los dos componentes básicos de un filtro CIC son un integrador y un filtro peine (comb). 1
Un integrador es simplemente un filtro IIR unipolar con coeficiente de retroalimentación unitario, su expresión en el dominio del tiempo discreto es:
y [n]= y [n−1]x [n ] Este sistema es conocido también como un acumulador. La función de transferencia para un integrador en el plano Z es: H I z =
1 −1 1−Z
Esto indica que la respuesta al impulso es básicamente un filtro pasa bajos con Roll-off de -20dB década. Esto se explica con la existencia de un polo único en Z=1. Quiere decir que un solo integrador por si mismo es inestable. El diagrama en bloque de un integrador es:
Figura 3 Y la representación, en el dominio del tiempo discreto, de la respuesta al impulso es:
Figura 3 El filtro comb que se emplea siempre es tipo FIR, ya sea para diezmado o interpolación. Su expresión en el dominio del tiempo discreto es:
y [n]=x [n]−x [n−RM ] Donde R representa una variación de frecuencia (la cual podrá ser modificada por la operación de interpolación o diezmado) y M es un parámetro de diseño que se denomina retardo diferencial (differential delay). M puede ser cualquier número entero positivo, pero está normalmente limitado a 1 o 2. (Se recomienda ver filtro comb, yo lo vi de Wikipedia y esta completo como para comprenderlo un poco mas y ademas esta claro) Repasemos la función de transferencia del filtro comb en el dominio de Z: H C z =1−Z −RM
2
Cuando R = M = 1, la respuesta al impulso es una función pasa altos con una ganancia de 20 dB por década, después de todo, es el inverso de un integrador. El diagrama en bloques queda descripto por:
Figura 4 Y su respuesta al impulso en el dominio del tiempo es:
Figura 5 Estructura de un filtro CIC: Para construir un filtro CIC, debemos unir N integradores seguidos de N filtros comb o peine (más adelante veremos la posición que deben ocupar cada grupo de filtros según sea el caso). Esto debería ser más que suficiente para que un filtro CIC funcione, pero para simplificar la señal de salida se añade una variación de frecuencia (R). Una vez incorporada la variación de frecuencia, la expresión matemática del filtro comb se verá modificada (se anula el valor R) quedando: y [n]=x [n ]−x [ n−M ]
Con esta modificación, el diagrama en bloques del filtro CIC de primer orden queda conformado como se lo muestra en la Figura 2, sólo que en dicha figura no se indica en qué lugar se aplica esta variación de frecuencia ni en qué sentido se realiza la variación de frecuencia (en aumento o disminución). En la siguiente figura se muestra cómo se aplica la variación de frecuencia R:
Figura 6
3
Con esto logramos tres cosas importantes: •
Reducir o trabajar con una frecuencia reducida en la mitad del filtro, lo cual aumenta su eficiencia.
•
Reducir el número de elementos retardantes necesarios en la sección de los filtros comb.
•
La estructura del integrador y la del filtro comb son ahora independientes al cambio de frecuencia. Esto significa que podemos diseñar un filtro CIC con un cambio de frecuencia programable y mantener la misma estructura del filtro. Esta última característica es la MAS IMPORTANTE.
Finalmente, podemos decir que la ecuación en el dominio del tiempo del filtro CIC queda dada por: y [ n]=x [n]−x [n−M ] y [n−1] Y la respuesta al impulso en el dominio del tiempo discreto, se observa a continuación junto a las del integrador y el filtro comb:
Figura 7 Para interpretar la Figura 7 podemos empezar diciendo que, por ejemplo, se eligió a RM=5, eso explica la forma de la respuesta al impulso del filtro comb. Luego imaginemos que se aplica un impulso en la entrada de dicho filtro, la salida obviamente será la función de transferencia de este filtro, o sea la que se observa en la figura. Esa será la entrada al integrador, obviamente lo que resulta a la salida es un tren de impulsos de amplitud +1 desde la muestra 0 a la 4 , cuando entre el impulso negativo, la salida será 0, o sea es cero desde la muestra 5 en adelante. Esta explicación indica que lo que se hace es nada más ni nada menos que la convolución entre las respuestas al impulso del filtro comb y el integrador y como resultado se obtiene la respuesta al impulso del filtro CIC. Finalmente esta respuesta al impulso del filtro CIC es rectangular, muy similar a la del filtro de Promedios Móviles, esto se debe a que AMBOS FILTROS SON DE LA MISMA FAMILIA y por ende tendrán idéntica forma en su magnitud respecto a sus respuestas en frecuencia, sus respuestas en fase son idénticas y sus funciones de transferencia difieren sólo en un factor de escala constante. Características en frecuencia: La función de transferencia en el dominio de Z de un filtro CIC de orden N es:
4
1−Z −RM H z =H z . H z= 1−Z −1 N I
N C
N
∑ RM −1
Z
=
N
−k
k=0
Es interesante ver que si se analiza el filtro de promedios móviles la funcion de transferencia precenta forma muy similar, lo cual comprueba la relacion entre los filtro de promedios móviles y los CIC. Ademas esto muestra que incluso considerando que un filtro CIC tiene integradores, los cuales por sí mismos tienen una respuesta al impulso infinita, dicho filtro es equivalente a N filtros FIR, teniendo cada uno una respuesta al impulso rectangular, fase lineal y retardo de grupo constante. En la siguiente figura (Figura 8) se ve la respuesta en frecuencia (módulo y fase) y la distribución de polos y ceros de un filtro CIC para el ejemplo que veníamos viendo con RM=5.
Figura 8 Donde el filtro comb produce RM ceros, igualmente espaciados alrededor del círculo unitario, y el integrador produce un polo simple, cancelando el cero en z=1. Vale aclarar que los ceros del filtro comb se encuentran localizados en Z m=e j2 m / RM donde m = 0, 1, 2, ..., RM-1 correspondiendo a la magnitud cero en la Figura 8 (a) Si ahora en H(z) reemplazamos a Z según Z =e j2 f , la magnitud del filtro adoptará la siguiente forma:
∣
∣H f ∣=
sen Mf f sen R
N
∣
Para valores grandes del factor R, la respuesta puede aproximarse a la siguiente expresión: ^
∣
∣H f ∣= RM
sin Mf Mf
N
∣
para
0 f
1 M
Esta aproximación puede ser usada en muchos problemas prácticos. Por ejemplo, el error en potencias que se produce es menor a 1 dB para RM 10, 1N 7 y 0 f 255/256M . A este punto, ya es notorio que este filtro tiene características de filtro pasa bajos. Ahora veamos su respuesta y comportamiento al variar los parámetros R, M y N. Supongamos el caso de R=7, N=4 y M=1:
5
Figura 9 Allí podemos ver la banda de paso y también algo muy importante, los nulos de la respuesta corresponden a múltiplos de f =1/ M. Por lo tanto se puede utilizar este parámetro en el diseño del filtro para manipular los ceros de la respuesta. Entonces, si mantenemos constantes los valores de R y N respecto al ejemplo anterior, y variamos M, obtenemos:
Figura 10 La Figura 10 comprueba lo dicho anteriormente y además muestra que el parámetro M tiene efecto sobre la amplitud de los lóbulos laterales, haciéndolos más pequeños a medida que M es mayor. Observemos ahora el comportamiento de la respuesta en frecuencia en función de la variación de R cuando los parámetros M y N se mantienen constantes:
6
Figura 11 Vemos que en este caso, de manera similar al anterior, el ancho de los lóbulos disminuyó, los ceros se dan en otras posiciones y la amplitud de los lóbulos laterales disminuye. Por último el parámetro N también afecta la magnitud de la respuesta en frecuencia del filtro, eso se observa a continuación:
Figura 12 Vemos que el efecto de aumentar N produce una atenuación marcada de los lóbulos laterales, ésto se debe que al aumentar N hace que aumente el orden de los ceros en la respuesta en frecuencia, ésto, a su vez, incrementa la atenuación en cercanías de los ceros, produciendo la atenuación de los lóbulos laterales que antes observamos. El hecho de aumentar los ceros al aumentar N produce un aumento de la caída de la banda de paso, estrechando así el ancho de banda del filtro. Esto es algo indeseado en algunos casos, es por eso que 7
se suele agregar un filtro adicional (no CIC) que compense esto (lo observamos en la Figura 1). A continuación se muestran dos figuras que muestran los efectos de agregar este compensador:
Figura 13 De la observación podemos decir que al compensar el filtro CIC se mejora el ancho de banda, pero a la vez se aumenta la amplitud de los lóbulos laterales. CIC Decimador: Cuando se aplica la operación de decimación en un filtro CIC, y éste es decimado por un factor R, la función de transferencia en el dominio de Z queda:
1−Z −M H z = 1−Z −1
N
esto afirma lo que se dijo en la página 4, de que ahora tanto los filtros comb como el integrador no son dependientes de las variaciones de frecuencia. El diagrama en bloques que produce esta respuesta se observa en la siguiente figura:
Figura 14 En esta figura se observa que la sección integradora, con N etapas de integración, procesa los datos de entrada a una velocidad de muestreo de f s mientras que la sección de filtros comb, con N filtros comb con retraso diferencial M cada uno, opera a una velocidad de muestreo menor, la cual es de f s / R. Una característica fundamental en los filtros CIC diezmadores se da alrededor de los nulos en múltiplos de 1/M, debido a que al plegarse la banda en esa zona se produce aliasing. Este 8
comportamiento se observa a continuación:
Figura 15 CIC Interpolador: La estructura de un filtro CIC interpolador se muestra en la siguiente figura:
Figura 16 Esta estructura es similar a la del filtro CIC diezmador, con el orden intercambiado entre las secciones integradora y de filtro comb. En este caso se produce un aumento de la frecuencia de muestreo en un factor R entre dichas secciones. El hecho de intercambiar posiciones entre las secciones del filtro no modifica el funcionamiento esencial del mismo, ya que la integración y el filtrado realizan operaciones lineales, esto permite dicho intercambio. Al igual que en el CIC diezmador, alrededor de múltiplos de 1/M, por plegado de la banda, se producen imagenes. El efecto se observa a continuación:
9
Figura 17 Referencias: •
"An Economical Class of Digital Filters for Decimation and Interpolation". Eugene B. Hogenauer
•
"LogiCORE IP CIC Compiler v4.0". Xilinx
•
"Understanding Digital Signal Processing, Second Edition". Richard G. Lyons
•
"Diseño e implementación con FPGA de un demodulador para comunicaciones digitales". Juan Antonio Guerrero Balmori
Autor: Molina, Carlos Daniel
10
Figura 1 Como la respuesta en frecuencia de los filtros CIC se asemeja a una Sinc (sen x/x), este filtro es seguido o precedido por un filtro pasa bajo FIR de alto desempeño, cuya tarea es compensar la banda pasante no lineal del filtro CIC. Esta arquitectura en cascada presenta varios beneficios, por ejemplo, con la decimación se puede reducir la complejidad computacional de los filtros pasa bajos de banda estrecha, en comparación a la complejidad que presentaría utilizar un solo filtro FIR pasa bajos. Componentes del filtro CIC: La estructura de un filtro CIC de primer orden se puede observar a continuación:
Figura 2 Como se puede ver, los dos componentes básicos de un filtro CIC son un integrador y un filtro peine (comb). 1
Un integrador es simplemente un filtro IIR unipolar con coeficiente de retroalimentación unitario, su expresión en el dominio del tiempo discreto es:
y [n]= y [n−1]x [n ] Este sistema es conocido también como un acumulador. La función de transferencia para un integrador en el plano Z es: H I z =
1 −1 1−Z
Esto indica que la respuesta al impulso es básicamente un filtro pasa bajos con Roll-off de -20dB década. Esto se explica con la existencia de un polo único en Z=1. Quiere decir que un solo integrador por si mismo es inestable. El diagrama en bloque de un integrador es:
Figura 3 Y la representación, en el dominio del tiempo discreto, de la respuesta al impulso es:
Figura 3 El filtro comb que se emplea siempre es tipo FIR, ya sea para diezmado o interpolación. Su expresión en el dominio del tiempo discreto es:
y [n]=x [n]−x [n−RM ] Donde R representa una variación de frecuencia (la cual podrá ser modificada por la operación de interpolación o diezmado) y M es un parámetro de diseño que se denomina retardo diferencial (differential delay). M puede ser cualquier número entero positivo, pero está normalmente limitado a 1 o 2. (Se recomienda ver filtro comb, yo lo vi de Wikipedia y esta completo como para comprenderlo un poco mas y ademas esta claro) Repasemos la función de transferencia del filtro comb en el dominio de Z: H C z =1−Z −RM
2
Cuando R = M = 1, la respuesta al impulso es una función pasa altos con una ganancia de 20 dB por década, después de todo, es el inverso de un integrador. El diagrama en bloques queda descripto por:
Figura 4 Y su respuesta al impulso en el dominio del tiempo es:
Figura 5 Estructura de un filtro CIC: Para construir un filtro CIC, debemos unir N integradores seguidos de N filtros comb o peine (más adelante veremos la posición que deben ocupar cada grupo de filtros según sea el caso). Esto debería ser más que suficiente para que un filtro CIC funcione, pero para simplificar la señal de salida se añade una variación de frecuencia (R). Una vez incorporada la variación de frecuencia, la expresión matemática del filtro comb se verá modificada (se anula el valor R) quedando: y [n]=x [n ]−x [ n−M ]
Con esta modificación, el diagrama en bloques del filtro CIC de primer orden queda conformado como se lo muestra en la Figura 2, sólo que en dicha figura no se indica en qué lugar se aplica esta variación de frecuencia ni en qué sentido se realiza la variación de frecuencia (en aumento o disminución). En la siguiente figura se muestra cómo se aplica la variación de frecuencia R:
Figura 6
3
Con esto logramos tres cosas importantes: •
Reducir o trabajar con una frecuencia reducida en la mitad del filtro, lo cual aumenta su eficiencia.
•
Reducir el número de elementos retardantes necesarios en la sección de los filtros comb.
•
La estructura del integrador y la del filtro comb son ahora independientes al cambio de frecuencia. Esto significa que podemos diseñar un filtro CIC con un cambio de frecuencia programable y mantener la misma estructura del filtro. Esta última característica es la MAS IMPORTANTE.
Finalmente, podemos decir que la ecuación en el dominio del tiempo del filtro CIC queda dada por: y [ n]=x [n]−x [n−M ] y [n−1] Y la respuesta al impulso en el dominio del tiempo discreto, se observa a continuación junto a las del integrador y el filtro comb:
Figura 7 Para interpretar la Figura 7 podemos empezar diciendo que, por ejemplo, se eligió a RM=5, eso explica la forma de la respuesta al impulso del filtro comb. Luego imaginemos que se aplica un impulso en la entrada de dicho filtro, la salida obviamente será la función de transferencia de este filtro, o sea la que se observa en la figura. Esa será la entrada al integrador, obviamente lo que resulta a la salida es un tren de impulsos de amplitud +1 desde la muestra 0 a la 4 , cuando entre el impulso negativo, la salida será 0, o sea es cero desde la muestra 5 en adelante. Esta explicación indica que lo que se hace es nada más ni nada menos que la convolución entre las respuestas al impulso del filtro comb y el integrador y como resultado se obtiene la respuesta al impulso del filtro CIC. Finalmente esta respuesta al impulso del filtro CIC es rectangular, muy similar a la del filtro de Promedios Móviles, esto se debe a que AMBOS FILTROS SON DE LA MISMA FAMILIA y por ende tendrán idéntica forma en su magnitud respecto a sus respuestas en frecuencia, sus respuestas en fase son idénticas y sus funciones de transferencia difieren sólo en un factor de escala constante. Características en frecuencia: La función de transferencia en el dominio de Z de un filtro CIC de orden N es:
4
1−Z −RM H z =H z . H z= 1−Z −1 N I
N C
N
∑ RM −1
Z
=
N
−k
k=0
Es interesante ver que si se analiza el filtro de promedios móviles la funcion de transferencia precenta forma muy similar, lo cual comprueba la relacion entre los filtro de promedios móviles y los CIC. Ademas esto muestra que incluso considerando que un filtro CIC tiene integradores, los cuales por sí mismos tienen una respuesta al impulso infinita, dicho filtro es equivalente a N filtros FIR, teniendo cada uno una respuesta al impulso rectangular, fase lineal y retardo de grupo constante. En la siguiente figura (Figura 8) se ve la respuesta en frecuencia (módulo y fase) y la distribución de polos y ceros de un filtro CIC para el ejemplo que veníamos viendo con RM=5.
Figura 8 Donde el filtro comb produce RM ceros, igualmente espaciados alrededor del círculo unitario, y el integrador produce un polo simple, cancelando el cero en z=1. Vale aclarar que los ceros del filtro comb se encuentran localizados en Z m=e j2 m / RM donde m = 0, 1, 2, ..., RM-1 correspondiendo a la magnitud cero en la Figura 8 (a) Si ahora en H(z) reemplazamos a Z según Z =e j2 f , la magnitud del filtro adoptará la siguiente forma:
∣
∣H f ∣=
sen Mf f sen R
N
∣
Para valores grandes del factor R, la respuesta puede aproximarse a la siguiente expresión: ^
∣
∣H f ∣= RM
sin Mf Mf
N
∣
para
0 f
1 M
Esta aproximación puede ser usada en muchos problemas prácticos. Por ejemplo, el error en potencias que se produce es menor a 1 dB para RM 10, 1N 7 y 0 f 255/256M . A este punto, ya es notorio que este filtro tiene características de filtro pasa bajos. Ahora veamos su respuesta y comportamiento al variar los parámetros R, M y N. Supongamos el caso de R=7, N=4 y M=1:
5
Figura 9 Allí podemos ver la banda de paso y también algo muy importante, los nulos de la respuesta corresponden a múltiplos de f =1/ M. Por lo tanto se puede utilizar este parámetro en el diseño del filtro para manipular los ceros de la respuesta. Entonces, si mantenemos constantes los valores de R y N respecto al ejemplo anterior, y variamos M, obtenemos:
Figura 10 La Figura 10 comprueba lo dicho anteriormente y además muestra que el parámetro M tiene efecto sobre la amplitud de los lóbulos laterales, haciéndolos más pequeños a medida que M es mayor. Observemos ahora el comportamiento de la respuesta en frecuencia en función de la variación de R cuando los parámetros M y N se mantienen constantes:
6
Figura 11 Vemos que en este caso, de manera similar al anterior, el ancho de los lóbulos disminuyó, los ceros se dan en otras posiciones y la amplitud de los lóbulos laterales disminuye. Por último el parámetro N también afecta la magnitud de la respuesta en frecuencia del filtro, eso se observa a continuación:
Figura 12 Vemos que el efecto de aumentar N produce una atenuación marcada de los lóbulos laterales, ésto se debe que al aumentar N hace que aumente el orden de los ceros en la respuesta en frecuencia, ésto, a su vez, incrementa la atenuación en cercanías de los ceros, produciendo la atenuación de los lóbulos laterales que antes observamos. El hecho de aumentar los ceros al aumentar N produce un aumento de la caída de la banda de paso, estrechando así el ancho de banda del filtro. Esto es algo indeseado en algunos casos, es por eso que 7
se suele agregar un filtro adicional (no CIC) que compense esto (lo observamos en la Figura 1). A continuación se muestran dos figuras que muestran los efectos de agregar este compensador:
Figura 13 De la observación podemos decir que al compensar el filtro CIC se mejora el ancho de banda, pero a la vez se aumenta la amplitud de los lóbulos laterales. CIC Decimador: Cuando se aplica la operación de decimación en un filtro CIC, y éste es decimado por un factor R, la función de transferencia en el dominio de Z queda:
1−Z −M H z = 1−Z −1
N
esto afirma lo que se dijo en la página 4, de que ahora tanto los filtros comb como el integrador no son dependientes de las variaciones de frecuencia. El diagrama en bloques que produce esta respuesta se observa en la siguiente figura:
Figura 14 En esta figura se observa que la sección integradora, con N etapas de integración, procesa los datos de entrada a una velocidad de muestreo de f s mientras que la sección de filtros comb, con N filtros comb con retraso diferencial M cada uno, opera a una velocidad de muestreo menor, la cual es de f s / R. Una característica fundamental en los filtros CIC diezmadores se da alrededor de los nulos en múltiplos de 1/M, debido a que al plegarse la banda en esa zona se produce aliasing. Este 8
comportamiento se observa a continuación:
Figura 15 CIC Interpolador: La estructura de un filtro CIC interpolador se muestra en la siguiente figura:
Figura 16 Esta estructura es similar a la del filtro CIC diezmador, con el orden intercambiado entre las secciones integradora y de filtro comb. En este caso se produce un aumento de la frecuencia de muestreo en un factor R entre dichas secciones. El hecho de intercambiar posiciones entre las secciones del filtro no modifica el funcionamiento esencial del mismo, ya que la integración y el filtrado realizan operaciones lineales, esto permite dicho intercambio. Al igual que en el CIC diezmador, alrededor de múltiplos de 1/M, por plegado de la banda, se producen imagenes. El efecto se observa a continuación:
9
Figura 17 Referencias: •
"An Economical Class of Digital Filters for Decimation and Interpolation". Eugene B. Hogenauer
•
"LogiCORE IP CIC Compiler v4.0". Xilinx
•
"Understanding Digital Signal Processing, Second Edition". Richard G. Lyons
•
"Diseño e implementación con FPGA de un demodulador para comunicaciones digitales". Juan Antonio Guerrero Balmori
Autor: Molina, Carlos Daniel
10
Related Documents 171j1w
Filtros Cic (cascaded Integrator-comb) 2l3x6e
November 2019 46
Cic 4u4e2x
October 2019 49
Filtros 2g1o52
May 2022 0
Cascaded Transformers 5o1w3n
December 2021 0
Cic 2012 6d1153
September 2022 0
Filtros 2g1o52
February 2021 0More Documents from "Carlos Daniel Molina" 56z32
Filtros Cic (cascaded Integrator-comb) 2l3x6e
November 2019 46
Amplificador Clase E.pdf 1h1t4j
August 2022 0
Preguntas De Repaso 452y16
May 2023 0
Obstruccion Nasal- Septodesviacion, Sinusitis Aguda Y Cronica. 6z3xe
June 2021 0
Las Funciones Comunicativas.pptx 21w6g
December 2019 48