Antenna Azimuth Controller Design 662a17
This document was ed by and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this report form. Report r6l17
Overview 4q3b3c
& View Antenna Azimuth Controller Design as PDF for free.
More details 26j3b
- Words: 1,589
- Pages: 17
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
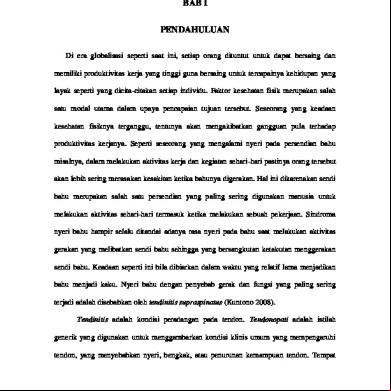
1.0 Title: Antenna Azimuth Position Control System 2.0 Objective: The objective, of the lab is to analyze and design a control system for the antenna azimuth position using MATLAB and SIMULINK. 3.0 Introduction: A position control system converts a position input command to a position output response. Position control finds widespread applications in antennas, robot arms, and computer disk drives. The radio telescope antenna in Fig. 1 is one example. The purpose of this system is to have the azimuth angle output follow the input angle. The input command is an angular displacement. The potentiometer converts the angular displacement into a voltage. Similarly, the output angular displacement is converted to a voltage by the potentiometer in the path. The signal and power amplifiers boost the difference between the input and output voltages. This amplified actuating signal drives the plant. The system operates to drive the error to zero when the input and the output match, the error will be zero and the motor will not run.
Figure 2.1: An Antenna Azimuth Position Control System
1
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Figure 2.2: Schematic Diagram of Antenna Azimuth
Figure 2.3: Block diagram for the system
2
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Table 2.1: The Schematic Parameters Parameter
Configuration 1
Configuration 2
Configuration 3
V
10
10
10
n
10
1
1
K
-
-
-
K1
100
150
100
a
100
150
100
Ra
8
5
5
Ja
0.02
0.05
0.05
Da
0.01
0.01
0.01
Kb
0.5
1
1
Kt
0.5
1
1
N1
25
50
50
N2
250
250
250
N3
250
250
250
JL
1
5
5
DL
1
3
3
By neglecting the dynamics of potentiometers the relationship between the output voltage and the input angular displacement is given by:
The relationship between motor and load is given by:
=
3
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
The equivalent inertia, Jm is
Similarly the equivalent viscous damping, Dm is
These quantities are substituted into the motor equation, yielding the transfer function of the motor from the armature voltage to the armature displacement. The gear ratio to arrive at the transfer function relating load displacement to armature voltage is;
From parameter values in Figure 3, design a controller consisting of P-I-D actions to improve the performance of the antenna system. The requirement is open which means that you should try to achieve as good as possible performance for transient, stability as well as signal tracking. Use a unit step signal 4.0 Solution 4.1 To find the transfer function of the system The block diagram of the system From the block diagram in figure 2:
Kpot
K
+
Kg
Kpot
4
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Where: Kpot=
= 0.318
=
0.25
0.13 So,
- Motor, load and gears
5
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Then the block diagram become a. Original block diagram
K
+ -
b. Pushing input potentiometer to the right past the summing junction + -
c. Showing equivalent forward transfer function + -
d. Final closed loop transfer function
Transfer function for the system
6
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
4.2 From the transfer function, it can be plotted the graph for the Root Locus, Nyquist, Step Response and Bode.
Figure 4.2.1: Root Locus graph
Figure 4.2.2: Nyquist graph
7
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Figure 4.2.3: Bode graph
Figure 4.2.4: Step Response graph
8
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Step response info: RiseTime: 55.2535
Overshoot: 0
SettlingTime: 99.1616
Undershoot: 0
SettlingMin: 0.9004
Peaks: 0.9995
SettlingMax: 0.9995
Peak Time: 189.6234
Find the value of K (preamplifier) from the transfer function above
The characteristic equation is:
s3 s2 s1 s0
1 101.32 a1 a2
132 5.09K b1 b2
9
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Then we need to tune the system with the range value of K to get the overshoot close to 10%. For K=23.95
Figure 4.2.5: Graph for K=23.95 (tuned)
Figure 4.2.6: MATLAB/SIMULINK diagram for standard system
10
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
4.3 Design a PID Controller Gc(S)
+
G(s)
-
Setting the Ti=∞ and Td=0 Gc(s)=Kp Then, Kp
+ -
Find the value of Kp Characteristic equation of the system, q(s)
Find the value of Kp by using Routh Stability criterion s3 s2 s1 s0
1 101.32 a1 a2
132 5.09+5.09Kp b1 b2
11
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
The maximum of Kp or Kcr/Ku is 2626.55 Substitute the value of Kp to the characteristic equation
Then substitute s=j⍵
For PID Controller Kp = 0.6Kp = 0.6(2626.55) = 1575.93 Ti = 0.5Tu = 0.5(0.547) = 0.2735 Td = 0.125Tu = 0.125(0.547) = 0.0684
12
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
The transfer function for the PID controller is
PID Controller transfer function Gc(S)
+ -
+ -
+ -
The transfer function for PID Controller is
13
G(s)
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
4.4 From the transfer function of PID controller, it can be plotted the graphfor the Root Locus, Nyquist, Step Response and Bode.
Figure 4.4.1: Root Locus graph for PID controller
Figure 4.4.2: Nyquist graph for PID controller
14
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Figure 4.4.3: Bode graph for PID controller
Figure 4.4.4: Step response graph for PID controller Step response info: RiseTime: 0.1065
Overshoot: 67.1068
SettlingTime: 3.6861
Undershoot: 0
SettlingMin: 0.5084
Peak: 1.6711
SettlingMax: 1.6711
PeakTime: 0.312
15
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Then we need to tune the system with the range value of K p to get the overshoot close to 10%. Kp=72
Figure 4.4.5: Graph for K=50 (tuned)
Figure 4.4.6: MATLAB/SIMULINK diagram for standard system
16
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
5.0 Discussion After all of the analysis was completed the system was well understood and possible solutions have been presented above. For the standard system, it will unstable when K>2627.55. From my simulation, I’ve use K=26 to achieve my target overshot for this system which is 10%. The overshoot that I’ve for K=23.95 is 9.93% which is close to the target. For the PID Controller, the stability range of the system is quite similar to the standard system which is Kp below 2626.55. The target for PID Controller system also 10% and after to be tuned the value of Kp=72 is to be the best overshoot that for this system which is 13.57%. 6.0 Conclusion As a conclusion, it can be said that the value of gain could be change for the standard system and for the PID system. The value of K or preamplifier for the standard system is lowest than the PID system that need to be tune to achieve the target. So, it can be concluded that the objective of the project was achieved and successfully with the own requirement.
17
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
1.0 Title: Antenna Azimuth Position Control System 2.0 Objective: The objective, of the lab is to analyze and design a control system for the antenna azimuth position using MATLAB and SIMULINK. 3.0 Introduction: A position control system converts a position input command to a position output response. Position control finds widespread applications in antennas, robot arms, and computer disk drives. The radio telescope antenna in Fig. 1 is one example. The purpose of this system is to have the azimuth angle output follow the input angle. The input command is an angular displacement. The potentiometer converts the angular displacement into a voltage. Similarly, the output angular displacement is converted to a voltage by the potentiometer in the path. The signal and power amplifiers boost the difference between the input and output voltages. This amplified actuating signal drives the plant. The system operates to drive the error to zero when the input and the output match, the error will be zero and the motor will not run.
Figure 2.1: An Antenna Azimuth Position Control System
1
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Figure 2.2: Schematic Diagram of Antenna Azimuth
Figure 2.3: Block diagram for the system
2
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Table 2.1: The Schematic Parameters Parameter
Configuration 1
Configuration 2
Configuration 3
V
10
10
10
n
10
1
1
K
-
-
-
K1
100
150
100
a
100
150
100
Ra
8
5
5
Ja
0.02
0.05
0.05
Da
0.01
0.01
0.01
Kb
0.5
1
1
Kt
0.5
1
1
N1
25
50
50
N2
250
250
250
N3
250
250
250
JL
1
5
5
DL
1
3
3
By neglecting the dynamics of potentiometers the relationship between the output voltage and the input angular displacement is given by:
The relationship between motor and load is given by:
=
3
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
The equivalent inertia, Jm is
Similarly the equivalent viscous damping, Dm is
These quantities are substituted into the motor equation, yielding the transfer function of the motor from the armature voltage to the armature displacement. The gear ratio to arrive at the transfer function relating load displacement to armature voltage is;
From parameter values in Figure 3, design a controller consisting of P-I-D actions to improve the performance of the antenna system. The requirement is open which means that you should try to achieve as good as possible performance for transient, stability as well as signal tracking. Use a unit step signal 4.0 Solution 4.1 To find the transfer function of the system The block diagram of the system From the block diagram in figure 2:
Kpot
K
+
Kg
Kpot
4
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Where: Kpot=
= 0.318
=
0.25
0.13 So,
- Motor, load and gears
5
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Then the block diagram become a. Original block diagram
K
+ -
b. Pushing input potentiometer to the right past the summing junction + -
c. Showing equivalent forward transfer function + -
d. Final closed loop transfer function
Transfer function for the system
6
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
4.2 From the transfer function, it can be plotted the graph for the Root Locus, Nyquist, Step Response and Bode.
Figure 4.2.1: Root Locus graph
Figure 4.2.2: Nyquist graph
7
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Figure 4.2.3: Bode graph
Figure 4.2.4: Step Response graph
8
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Step response info: RiseTime: 55.2535
Overshoot: 0
SettlingTime: 99.1616
Undershoot: 0
SettlingMin: 0.9004
Peaks: 0.9995
SettlingMax: 0.9995
Peak Time: 189.6234
Find the value of K (preamplifier) from the transfer function above
The characteristic equation is:
s3 s2 s1 s0
1 101.32 a1 a2
132 5.09K b1 b2
9
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Then we need to tune the system with the range value of K to get the overshoot close to 10%. For K=23.95
Figure 4.2.5: Graph for K=23.95 (tuned)
Figure 4.2.6: MATLAB/SIMULINK diagram for standard system
10
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
4.3 Design a PID Controller Gc(S)
+
G(s)
-
Setting the Ti=∞ and Td=0 Gc(s)=Kp Then, Kp
+ -
Find the value of Kp Characteristic equation of the system, q(s)
Find the value of Kp by using Routh Stability criterion s3 s2 s1 s0
1 101.32 a1 a2
132 5.09+5.09Kp b1 b2
11
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
The maximum of Kp or Kcr/Ku is 2626.55 Substitute the value of Kp to the characteristic equation
Then substitute s=j⍵
For PID Controller Kp = 0.6Kp = 0.6(2626.55) = 1575.93 Ti = 0.5Tu = 0.5(0.547) = 0.2735 Td = 0.125Tu = 0.125(0.547) = 0.0684
12
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
The transfer function for the PID controller is
PID Controller transfer function Gc(S)
+ -
+ -
+ -
The transfer function for PID Controller is
13
G(s)
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
4.4 From the transfer function of PID controller, it can be plotted the graphfor the Root Locus, Nyquist, Step Response and Bode.
Figure 4.4.1: Root Locus graph for PID controller
Figure 4.4.2: Nyquist graph for PID controller
14
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Figure 4.4.3: Bode graph for PID controller
Figure 4.4.4: Step response graph for PID controller Step response info: RiseTime: 0.1065
Overshoot: 67.1068
SettlingTime: 3.6861
Undershoot: 0
SettlingMin: 0.5084
Peak: 1.6711
SettlingMax: 1.6711
PeakTime: 0.312
15
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
Then we need to tune the system with the range value of K p to get the overshoot close to 10%. Kp=72
Figure 4.4.5: Graph for K=50 (tuned)
Figure 4.4.6: MATLAB/SIMULINK diagram for standard system
16
Contr ol Eng ineer ing ( MEC 52 2)
UNI V ER SIT I T EK NOL OG I M AR A Fac ul ty Of Mec ha nic al Engi neer ing
5.0 Discussion After all of the analysis was completed the system was well understood and possible solutions have been presented above. For the standard system, it will unstable when K>2627.55. From my simulation, I’ve use K=26 to achieve my target overshot for this system which is 10%. The overshoot that I’ve for K=23.95 is 9.93% which is close to the target. For the PID Controller, the stability range of the system is quite similar to the standard system which is Kp below 2626.55. The target for PID Controller system also 10% and after to be tuned the value of Kp=72 is to be the best overshoot that for this system which is 13.57%. 6.0 Conclusion As a conclusion, it can be said that the value of gain could be change for the standard system and for the PID system. The value of K or preamplifier for the standard system is lowest than the PID system that need to be tune to achieve the target. So, it can be concluded that the objective of the project was achieved and successfully with the own requirement.
17
Related Documents 171j1w

Antenna Azimuth Controller Design 662a17
November 2019 105
Antenna Azimuth Position Control System 1sm4w
October 2019 161
Antenna Azimuth Position Control System 1sm4w
December 2019 111
Antenna Design 4s5j2p
July 2020 0
Antenna Design 4s5j2p
July 2020 0
Micro Strip Antenna Design 3p4b
March 2021 0More Documents from "Nisa Ien" 62u6q
Antenna Azimuth Controller Design 662a17
November 2019 105
Diabetes Mellitus 2 2ur5i
October 2019 92
Semi Detailed Lesson Plan In Mapeh For Second Year 3r4h6d
October 2019 57Cara Membuat Piscok 14u37
November 2019 50
Kebijakan Direktur Tentang Pembentukan Tim Hiv Aids Rsgm 4b51w
July 2020 0